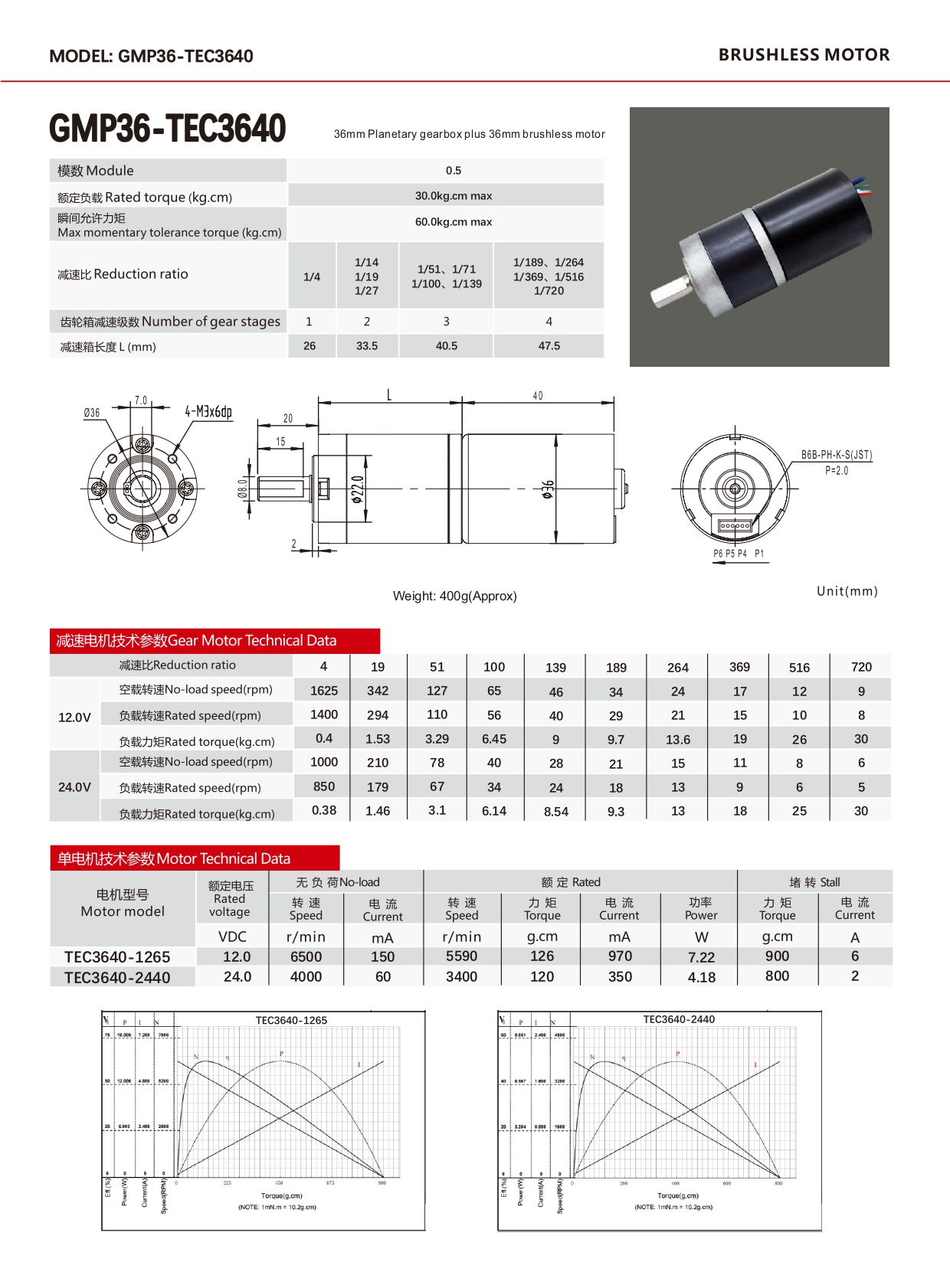
GMP36-TEC3640 36mm Brushless Planetary Gear Motor nga Taas og Torque BLDC Gearmotor 12V 24V para sa Industrial Automation ug AGV





Taas nga Densidad sa Torque: Ang 36mm brushless motor gi-optimize para sa taas nga magnetic flux, nga naghatag og impresibong padayon nga torque. Ang planetary gearbox dugang nga nagpadaghan niini nga torque, nga nagtugot sa unit sa pagpadagan sa bug-at nga mga karga sa hinay nga tulin nga adunay taas nga kahusayan (kasagaran >85% sa kinatibuk-an).
Kasaligan nga Walay Brush: Tungod kay walay mga brush nga isul-ob, kini nga motor nagtanyag og talagsaong gidugayon sa operasyon (kasagaran 10,000+ ka oras) ug halos walay maintenance nga operasyon. Kini usab nagpatunghag gamay nga kasaba sa kuryente ug mas taas nga episyente kaysa mga alternatibong brushed.
Compact Axial Length: Sa 40mm lang nga gitas-on (wala gilakip ang shaft), kini nga gearmotor mubo ra kaayo kon itandi sa diyametro niini, nga naghimo niini nga sulundon alang sa mga aplikasyon diin limitado ang giladmon apan anaa ang gilapdon.
Precision Planetary Gearbox: Ang multi-stage gearbox adunay mga gahi nga steel gears ug precision bearings aron maminusan ang backlash (kasagaran <1-2°). Nagkalain-laing reduction ratios gikan sa 5:1 hangtod 500:1 ang magamit aron mohaom sa mga kinahanglanon sa speed/torque.
Mga Integrated Feedback Options: Ang mga Hall sensor o encoder mahimong i-integrate para sa closed-loop speed ug position control. Adunay mga custom winding options nga magamit para sa 12V o 24V nga mga sistema.
Mga Automated Guided Vehicle (AGV): Gigamit isip mga drive wheel motor o lift mechanism actuator sa mga robot sa bodega ug mga sakyanan sa pagdumala sa materyal.
Industrial Automation: Maayo alang sa pag-index sa mga lamesa, conveyor drive, ug automated assembly line actuator nga nanginahanglan og tukmang motion control.
Mga Collaborative Robot (Cobot): Angay para sa mga joint actuator sa mga light payload cobot diin ang pagkakomplikado ug hapsay nga paglihok hinungdanon.
Mga Kagamitang Medikal: Gigamit sa mga lamesa sa operasyon, mga lift sa pasyente, ug mga mekanismo sa pagposisyon sa sistema sa imaging.